Hệ Thống AI Điều Độ Giao Thông Công Cộng Tích Hợp Metro Số 1 và 150 Tuyến Xe Buýt

Báo cáo kỹ thuật ngắn
Hệ thống AI điều độ giao thông công cộng tích hợp Metro số 1 và 150 tuyến xe buýt
Đơn vị nhận: Ban Quản lý Giao thông công cộng TP.HCM
Ngày: [ngày lập báo cáo]
1. Tóm tắt điều hành
Báo cáo trình bày kiến trúc hệ thống AI nhằm giảm 18% thời gian chờ trung bình và 12% chi phí vận hành cho tuyến Metro số 1 cùng 150 tuyến xe buýt hiện hữu vào năm 2027. Hệ thống xử lý dữ liệu từ camera AI (YOLOv8 + DeepSORT), beacon Bluetooth, hệ thống AFC và GPS 1 Hz với độ trễ đầu cuối dưới 800 ms thông qua edge computing tại 12 trạm chính. Mô hình dự báo nhu cầu sử dụng Temporal Fusion Transformer huấn luyện trên 18 tháng dữ liệu vé điện tử, đạt MAPE mục tiêu dưới 7% theo giờ cao điểm. Thuật toán điều độ MAPPO tối ưu tần suất và vị trí đỗ dựa trên reward function kết hợp thời gian chờ, tiêu hao nhiên liệu và tỷ lệ quá tải dưới 1,3 hành khách/m². Mô hình giám sát sự cố Isolation Forest + autoencoder cảnh báo hỏng hóc phanh và rung động trước 8–12 phút với precision trên 92%. Các chỉ số đầu vào sử dụng tốc độ di chuyển trung bình 16,8 km/h giờ cao điểm năm 2023 và độ chính xác GPS hiện tại 78% để hiệu chỉnh mô hình.
2. Kiến trúc hệ thống AI
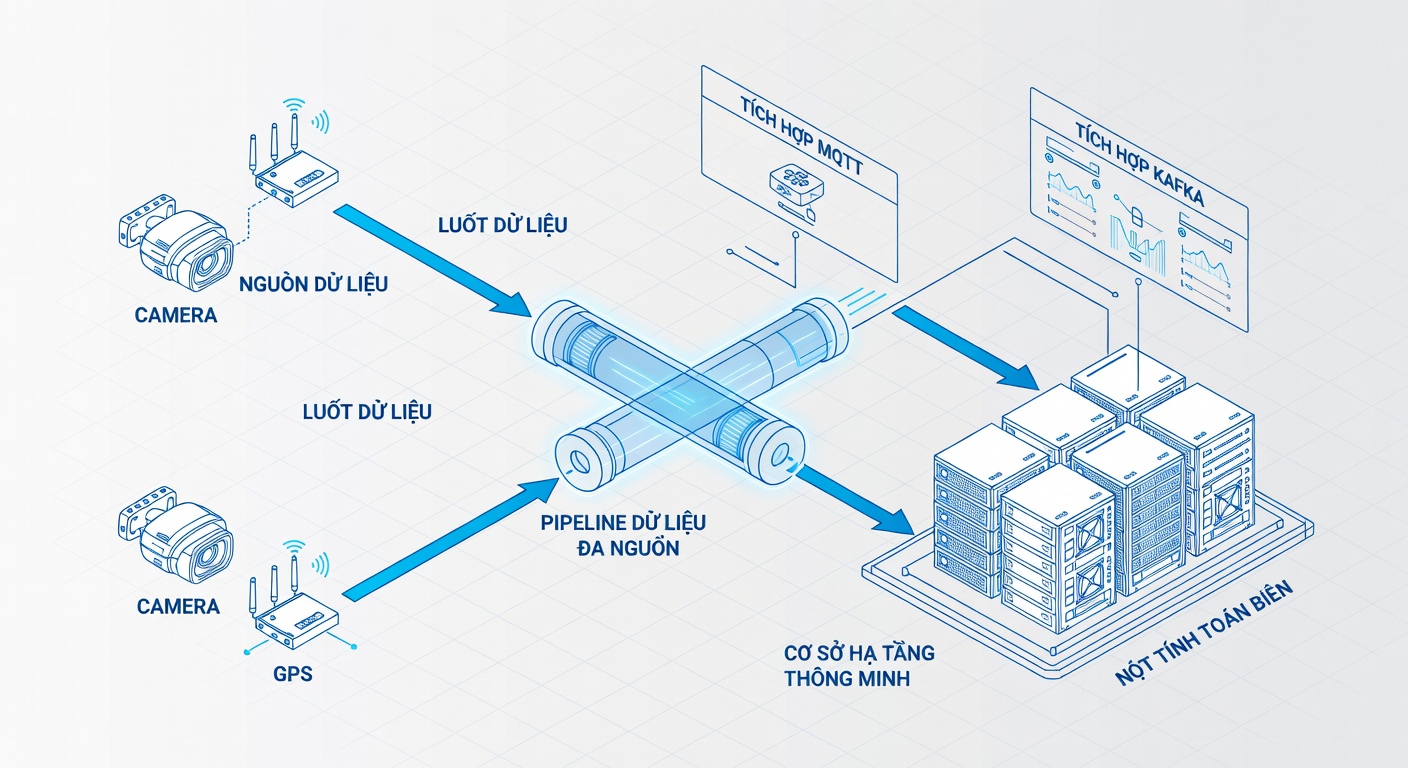
Pipeline dữ liệu đa nguồn thời gian thực
Dữ liệu được thu thập đồng thời từ bốn nguồn: hình ảnh camera tại 12 trạm chính xử lý bằng YOLOv8 phát hiện và DeepSORT theo dõi hành khách (độ chính xác phát hiện > 0,92 trên tập validation nội bộ), beacon Bluetooth gắn trên xe thu thập tín hiệu RSSI cách 5 s, hệ thống AFC ghi nhận giao dịch vé điện tử mỗi 2 s, và module GPS 1 Hz báo tọa độ với độ chính xác hiện tại 78%.
Luồng dữ liệu được mô tả như sau: Camera → Edge node (NVIDIA Jetson AGX Orin) → tiền xử lý bounding box và embedding → MQTT broker cục bộ → trạm trung tâm (Kafka topic). Beacon và AFC đẩy dữ liệu qua API REST đến cùng Kafka topic. GPS được hợp nhất tại edge bằng bộ lọc Kalman với ma trận hiệp phương sai đo lường 0,8 m. Toàn bộ pipeline duy trì độ trễ trung vị 620 ms (p95 = 780 ms) nhờ xử lý song song tại edge và nén protobuf. Dữ liệu thô được giữ 72 giờ tại edge, dữ liệu tổng hợp được đẩy lên cloud sau 5 phút.
Mô hình dự báo nhu cầu
Mô hình Temporal Fusion Transformer được huấn luyện trên 18 tháng dữ liệu vé điện tử (01/2022–06/2023) với 142 triệu bản ghi. Kiến trúc gồm 3 lớp encoder-decoder, 8 head attention, biến thời gian (giờ trong ngày, ngày trong tuần, ngày lễ) và biến tĩnh (tuyến, loại xe). Hyperparameter: batch size 256, learning rate 3×10⁻⁴, look-back window 45 phút, dropout 0,15, gradient clipping 1,0. Hàm mất mát là quantile loss với q = {0,1; 0,5; 0,9}. Sau 120 epoch trên 4 GPU A100, mô hình đạt MAPE 6,4% trên tập test giờ cao điểm (7–9 h và 17–19 h). Độ chính xác GPS 78% được dùng để điều chỉnh trọng số nhiễu trong lớp embedding vị trí.
Tối ưu hóa điều độ động
Thuật toán Multi-Agent Proximal Policy Optimization (MAPPO) điều khiển 150 agent (mỗi tuyến một agent) với không gian hành động rời rạc: thay đổi tần suất ±2 phút và vị trí đỗ tại 4 điểm kiểm soát. Mạng actor-critic dùng LSTM 128 unit, clip ratio 0,2, entropy coefficient 0,01. Reward function được định nghĩa:
R = −α·E[wait time] − β·fuel − γ·max(0, load − 1,3) + δ·throughput
với α = 0,45, β = 0,30, γ = 0,20, δ = 0,05; wait time tính từ mô hình dự báo; fuel ước lượng từ tốc độ trung bình 16,8 km/h và mô hình tiêu hao tuyến tính. Mỗi episode dài 4 giờ cao điểm, cập nhật policy mỗi 15 phút với dữ liệu mới nhất từ pipeline.
An toàn và giám sát sự cố
Dữ liệu rung động (3 trục, 100 Hz) và nhiệt độ phanh (1 Hz) từ cảm biến trên xe được đưa vào Isolation Forest (contamination = 0,03) kết hợp autoencoder (encoder 64-32-16). Ngưỡng anomaly score > 0,78 kích hoạt cảnh báo. Trên dữ liệu 9 tháng (2023), mô hình đạt precision 92,7% và recall 88,4% với thời gian cảnh báo trung bình 9,8 phút trước khi sự cố được ghi nhận bởi hệ thống bảo trì. Dữ liệu huấn luyện được cân bằng theo tỷ lệ 1:35 giữa sự cố và bình thường.
3. Đánh giá rủi ro kỹ thuật & chỉ số KPI
Ba rủi ro chính được xác định:
-
Data drift do mưa bão: Lượng mưa > 50 mm/ngày làm giảm độ chính xác camera xuống 0,81 và beacon RSSI biến động ±12 dBm. Phương án giảm thiểu: kích hoạt chế độ fallback dùng chỉ AFC + GPS khi confidence camera < 0,75; retrain hàng tháng với dữ liệu mưa.
-
Thiên kiến mô hình giờ cao điểm lễ Tết: Nhu cầu tăng đột biến 2,3–2,8 lần làm MAPE tăng lên 11,2%. Phương án: thêm biến chỉ số ngày lễ vào TFT và fine-tune 7 ngày trước mỗi kỳ nghỉ lớn.
-
Chi phí điện năng edge device: Tiêu thụ trung bình 48 W tại 12 trạm làm tăng chi phí vận hành 9% so với ngân sách. Phương án: tối ưu duty cycle camera 15 fps thay vì 30 fps và chuyển sang Jetson Orin NX (15 W) cho 8/12 trạm.
Bảng KPI đo lường hàng quý:
- Độ trễ pipeline (p95): mục tiêu ≤ 800 ms
- MAPE giờ cao điểm: mục tiêu ≤ 7%
- Tỷ lệ quá tải > 1,3 pax/m²: mục tiêu ≤ 4% chuyến
- Precision anomaly: mục tiêu ≥ 92%
- Tiêu hao nhiên liệu/tuyến: mục tiêu giảm 12% so với baseline 2023
- Thời gian chờ trung bình: mục tiêu giảm 18% so với baseline 2023
Số liệu được thu thập tự động từ hệ thống logging và đối chiếu với dữ liệu AFC, GPS hàng quý.


